
There has recently been quite a bit of discussion on the fmt-nuts mailing list about the BG7TBL GPSDO and whether its 10 MHz output is accurate. I don’t own one but Wes Stewart, N7WS, sent me his to test.
After letting the unit warm up for 24 hours, I did a five day measurement comparing the BG7TBL GPSDO to a passive hydrogen maser that’s known to be accurate to about 5×10-14.
As part of the same run, I also measured my HP/Symmetricom Z3805A GPSDO that’s known to be quite good, and a Leo Bodnar “Precision Frequency Reference” GPSDO (the two-output version).
There’s been uncertainty about whether the frequency offset problem is real (it is), or if it has been fixed as there are several different versions of the BG7TBL unit floating around (it has; see below for the details). The unit Wes sent me was purchased in April, 2020 was the “2019-08-03” version. The front panel and label shown here may help further identify it.


(There are a bewildering variety of “BG7TBL” GPSDOs on eBay and aliexpress. I’ve heard suspicions that BG7TBL is actually a club station and sells designs made by a number of different people, so there is no single person designing these things. That might explain it.)
Test Results
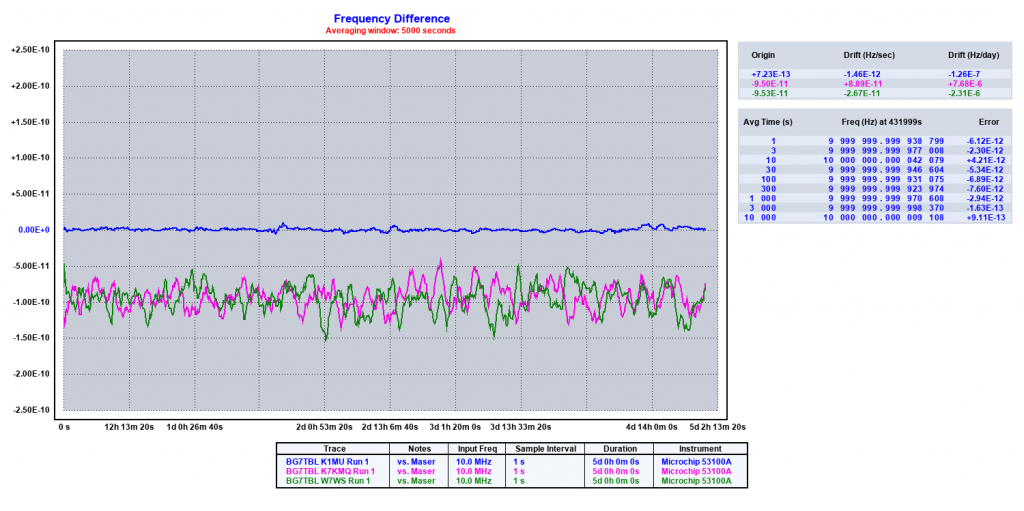
Here is a frequency strip-chart showing the performance of the BG7TBL, Bodnar, and Z3805A units over five days. The table at the right shows the measured frequency of Wes’s 2019 unit averaged over various intervals.

The violet band is the peak-to-peak noise of the Bodnar unit; the BG7TBL trace (blue) is significantly noisier, but in the image the purple haze covers up the blue. The green is the Z3805A, unsurprisingly the quietest of all.
The BG7TBL frequency error is almost -1×10-10: the average offset over the five days was -9.62×10-11. The average offset of the Bodnar unit was -1.55×10-11 (well within its spec), and the Z3805A was about +2.8×10-15(!). Averaging by 5000 gives a cleaner-looking display where the BG7TBL frequency offset (and noise) is strikingly obvious:

Here is an Allan Deviation plot of the three GPSDOs:

If you’re not familiar with Allan Deviation, it’s a statistic that shows
- on the Y axis the likely frequency difference between any pair of measurement as compared to the carrier frequency, in a way that’s similar to ” 3 parts per million” (which is the same as “3×10-6“); and
- on the X axis the interval between any pair of those measurements.
It’s a way to see a wide range of performance over a wide time range. If you’d like to learn more, you can check out my post Allan Deviation — The Time-Nut’s Statistic.
The BG7TBL ADEV plot is interesting for a couple of reasons. First, stability over very short periods (1 to 10 seconds) is quite good — the oscillator they are using works pretty well. It’s better than the Bodnar at intervals of less than 25 seconds, which makes sense because the BG7TBL uses an OCXO while the Bodnar has a TCXO; TCXOs are usually noisier than OCXOs.
But the plot has an immediate upward slope that is quite different from the Z3805A where the stability remains pretty constant until about 1000 seconds, or the Bodnar which is basically flat until the control loop kicks in. And while the “hump” in the transition area is over an order of magnitude worse than either the Z3805A or Bodnar units, and the downward turn is not nearly as pronounced. (The Bodnar’s steep ADEV drop at ~40K seconds (e.g, about 12 hours) is interesting and, so far, unexplained.)
These results indicate that the control loop of the BG7TBL has a couple of problems — its parameters are not well tuned for the OCXO being used, but most important, it results in a constant frequency error. It’s believed the earlier BG7TBL units use a frequency lock, as opposed to the more usual phase lock, loop. FLLs are sometimes prone to offset errors like this.
Design Changes Over Time
After doing this testing, I looked at a couple of other BG7TBL units, thanks to Bob, K7KMQ, who sent me an older 2017-10-09 version, and Rick, K1MU, who sent his 2020-01-10 model.
The offset problem has certainly been fixed in the 2020-01-10 version. It was very close to where it should be, about 4×10-13, hugely better than the older versions. Its stability is also better:

So, the answer to our mystery is that the 2017 and 2019 versions both show the frequency offset error, but the 2020 version is much, much better. It’s also in a completely different form factor:

Out of curiosity I opened the units up. All three used a CTS 10 MHz OCXO, though with different part numbers. On the 2019 unit the GPS module is unlabeled, but it responds to the u-blox control software as a NEO-M8T or similar:


The module in the 2020 version is labeled as a NEO-M7N, which is a generation-and-a-half old low-end unit. As far as I could tell, it doesn’t support a 0-d timing mode, which will limit mid-to-long scale performance. There’s of course no way to know whether any of these parts are real or counterfeit.

I forgot to get a picture of the bottom of the 2020 unit. Sigh…
Finally, I looked at the phase noise of the three units:

It’s not too bad, though the way the newest (K1MU) unit flattens out at about 100 Hz offset and stays that way to a sharp cliff at about 20 kHz is odd. I’ve seen that before when there’s a low pass filter in the signal path. In this case, it might be related to the time constant of the control loop.
Summary
In summary, the 2020-01-10 (and presumably newer) BG7TBL GPSDOs are good performers with a couple of quirks. The 2019-08-03 (and presumably older) units have a significant frequency offset, despite having pretty decent stability.