
Comparing Crystal Oscillators with GPS
In part 1 and part 2 of this series, we saw that crystal oscillators and GPS receivers both have strengths and weaknesses as frequency standards.
Now, let’s compare them to understand how they differ, and how they complement each other. But first…
Allan Deviation (or ADEV) is a statistic that’s almost universally used in the time and frequency measurement world. It’s very handy for understanding the stability of clocks[1]or oscillators; we tend to think of them as the same thing because in a single graph it can span from very short to very long measurement intervals, and from very small to very large amounts of instability, or noise.[2]That huge range is mainly because ADEV plots are almost always log/log, or logarthimic, in both axes. It turns out that’s the best match for typical clock performance curves. I’ll be using it a lot because ADEV allows us to compare the overall performance of multiple clocks at a glance.
In short, ADEV is a measurement of how much any two measurements of a clock made X seconds apart are likely to vary. The concept is easier to grasp if you think about how randomness has to be proven in other systems: casinos, lotteries, or even online gaming sites where players compare alternatives to Roobet to see which platforms handle fairness transparently. In both cases, the goal is the same—turning what feels like chance into something that can be measured. The measurement interval is on the horizontal axis, and the likely variation at any interval is shown on the vertical, expressed as a ratio of frequency error to nominal frequency in scientific notation.
Shorthand for the measurement interval is the Greek character tau. I try to avoid jargon in these posts, but “tau” is so much easier than “measurement interval” that I’ll use it frequently.
So if the line on the plot at the 10 second point on the horizontal axis intersects the 1×10-9 point on the vertical axis, that means that measurements taken 10 seconds apart are likely to vary by 1 part per billion, and we say that the ADEV is “1x 10-9 at tau 10 seconds.”. I published a blog post that introduces ADEV in a bit more detail.
Now, back to business…
We’ll use the ADEV statistic to look at the performance of a good quality GPS module, a u-blox NEO-M8T receiver (shown in the blue trace below), and the output of an inexpensive surplus OCXO from eBay, an Isotemp OCXO130-131 (the violet trace), over a three day period:
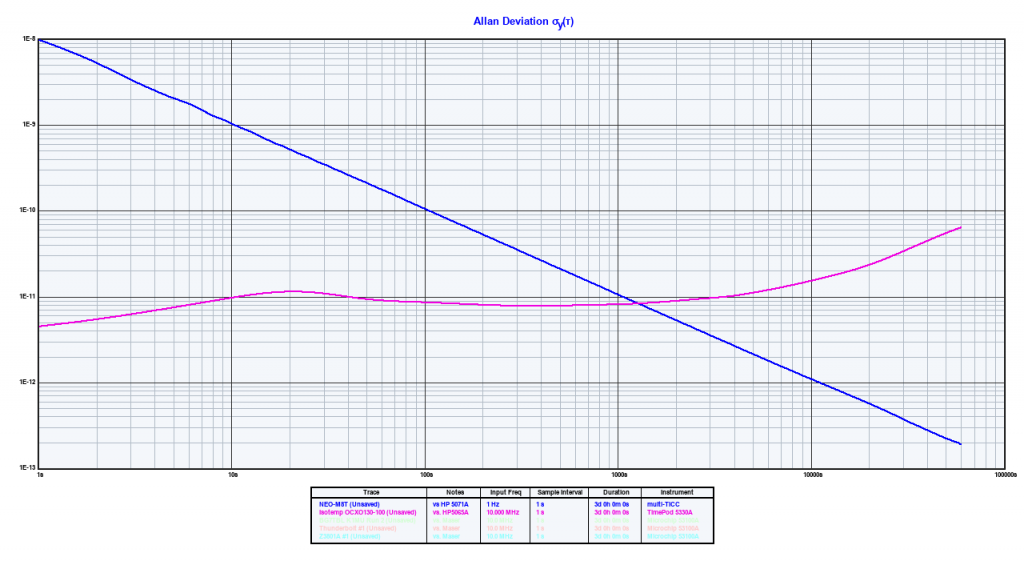
First, look at the GPS trace (blue). The slope of that line is -1 — when you increase the interval between measurements by a factor of 10, the expected noise in those measurements goes down by the same factor of 10. That’s very typical of GPS behavior because the absolute jitter (e.g., 10 nanoseconds) of the pulses stays almost the same regardless of how far apart the measurements are, so longer measurement intervals average that noise away and the ADEV keeps getting better and better.
Now look at the OCXO (violet). Its ADEV is almost flat from 1 second to about 1000 seconds, but then it starts to turn upward. That’s because at longer measurement interals you start to see the effects of both aging and environmental changes (e.g., the air conditioner cycling on and off).
This measurement covers a relatively short range of intervals because that range is most relevant to the performance of a GPSDO, which is what we’re ultimately talking about.
If you look at most oscillators over a wider range, from much shorter to much longer measurement intervals, they will have an ADEV curve resembles the profile of a bathtub — starting high, rolling down to a broad floor, then rolling upward again. Here’s an example of that shape:
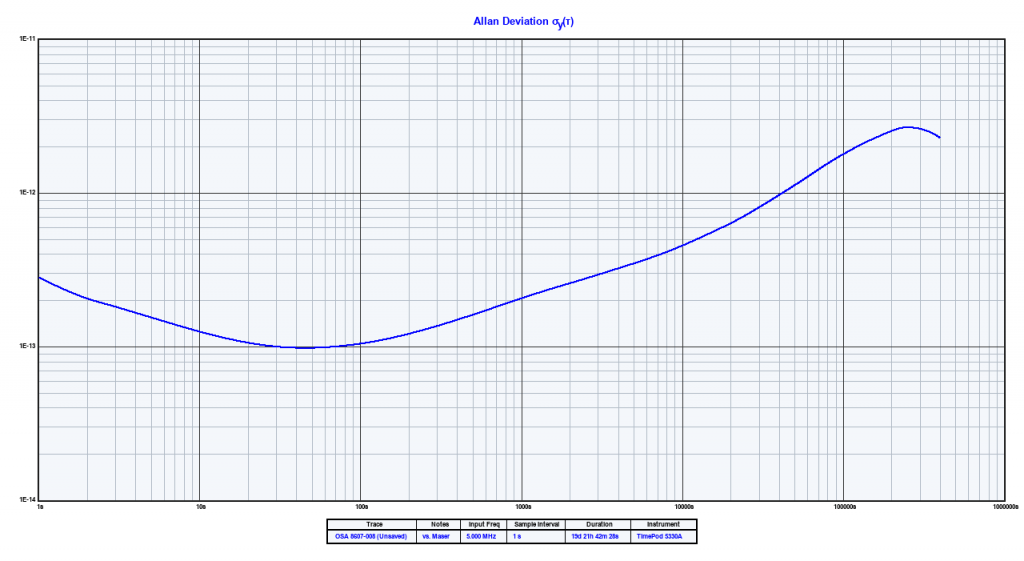
This is the ADEV of an extremely high quality OCXO measured over 15 days; its overall noise is about two orders of magnitude better than the inexpensive Isotemp. But the bathtub is the typical shape for crystal oscillators; spending more money typically (a) moves the whole curve lower on the graph; and/or (b) broadens the floor of the bathtub (i.e., increases the range of optimum performance).
And some oscillators are optimized for different things. The best performance at very short intervals may be inconsistent with the best drift performance.[3]This is often the tradeoff with oscillators designed for ultra low phase noise; they often exhibit increased drift and environmental sensitivity. For best results, you need to look at performance over the interval most important for your application. The ADEV plot is the best tool to do that.
So in summary, XOs usually have better stability over short intervals, but over longer periods the GPS catches up and then far exceeds it. The goal of a GPSDO is to generate an output that preserves the crystal’s short term stability while maintaining the long term stability and accuracy of the GPS signal, giving the best of both worlds.
In part 4 of this series, we’ll see how a GPSDO does that.
References
| ↑1 | or oscillators; we tend to think of them as the same thing |
|---|---|
| ↑2 | That huge range is mainly because ADEV plots are almost always log/log, or logarthimic, in both axes. It turns out that’s the best match for typical clock performance curves. |
| ↑3 | This is often the tradeoff with oscillators designed for ultra low phase noise; they often exhibit increased drift and environmental sensitivity. |
3 comments
[…] of crystal oscillators, then in part 2 see how GPS can be used as a frequency standard. In part 3, I’ll compare XO and GPS performance. Finally, part 4 will put it all together to show how a […]
[…] the frequency of an oscillator. That’s what makes a GPS disciplined oscillator (GPSDO) and in part 3 of this series, we’ll look at how that’s […]
[…] seen the strengths and weaknesses of both crystal oscillators and GPS receivers, and then compared those […]